座標変換と回転
ドローンのピッチ・ロール・ヨー って角度が あって、方位角と合わせて、ちょっと地球座標からの角度を出したいんですよね。
昔、むか~し、ロボットやってたのよね。僕。。それでロボットって地面があって足があって胴体があって腕があって、なので、手を動かすと、ベクトルを足から計算していって手の先の位置を決めるのに、座標軸がいっぱいあって。。いや~ん。人間ってそんなの計算してないやん!ってことで、ニューラルネットワークとかファジィ制御とかやってたわけです(笑)
クリックしてmech_ctrl_eng_study_20160120.pdfにアクセス
が。。ここに来て。。やっぱ、座標変換便利だよなとw
座標変換については、今だとむちゃくちゃ便利に。。Pythonだとライブラリーがあったりする
まぁ、きっとUnityとかAnimationとか3D系ができてるってことは、こういう座標系の変換の嵐なんで、ライブラリーきっとしっかりしているんだろうねぇ~
しかし。。ライブラリーを使うと、何やっているのか??わかんなかったりする(笑)

このあたりを読むと良さそう。
ピッチ・ロール・ヨー
とはいえ、ドローンが飛んでたとして。。
![]()

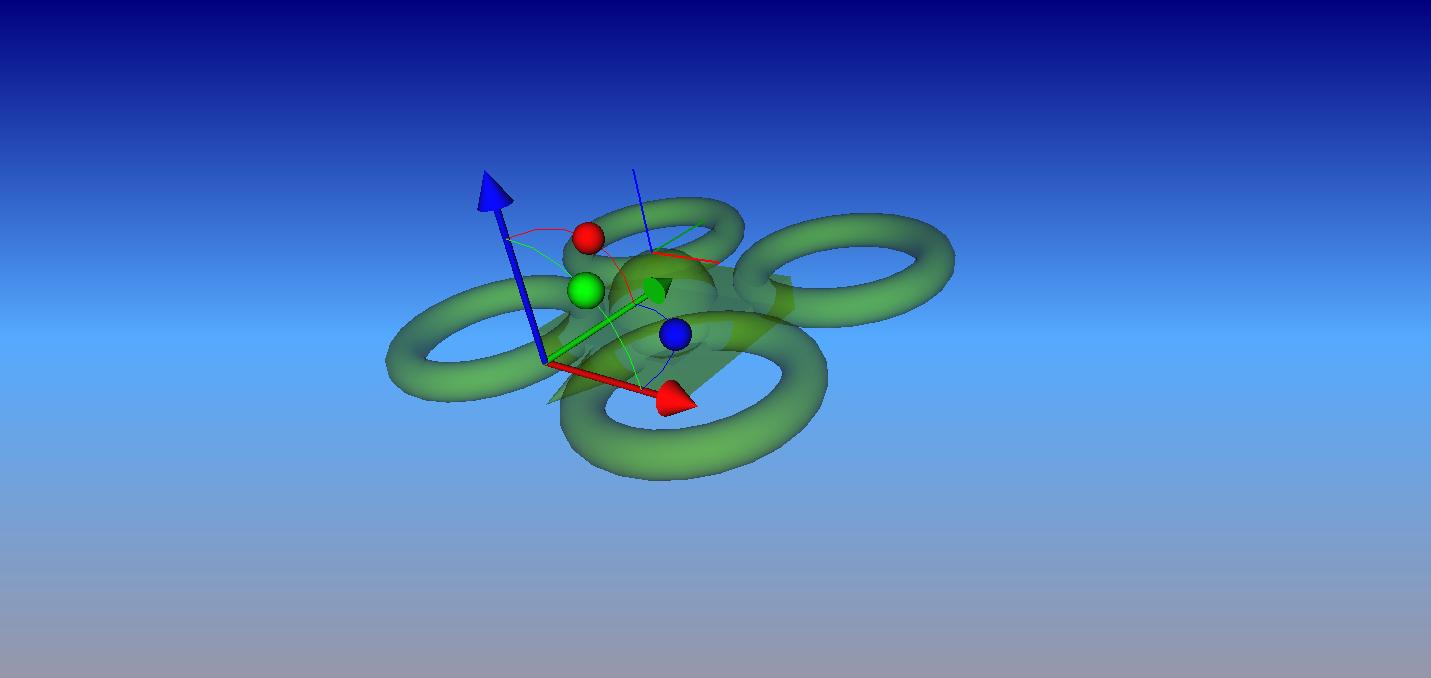
ドローンの座標系があって(本当は真ん中だけど)。。
![]()

ドローンの場合、前後左右がわかりにくいけど。。 前と思う方に対して 傾いているのを、ピッチ角がついた状態っていう。
![]()

それに対して、横向きに傾くと、ロールしているといい。
![]()

Z軸に対して、回転しているのを、ヨー角がついているという。
![]()

飛行機の操作系 だと ピッチ(エレベータ) ロール(エルロン) ヨー(ラダー)。。飛行機やってた僕にはわかりやすいけど。。今ドローンやってる人って、進行方向ってあまり気にしないみたいなので、ピッチとロールの表現って難しいって感じました(笑)
座標変換

このあたりを読むとわかるのかな?<おぃ
画像イメージとかだと、アフィン変換になって、OpenCVとかの出番になるんですね。

って横道にそれると余計にわからないですね。。
EKFによる姿勢推定

コメントを残していただけるとありがたいです