GPSにはまってます。
このあいだ、Ardupilotの実演を見てきて、少しGPSに興味がわいています。決して、下町ロケットをみて、みちびきの電波を受けたくなったわけじゃあありません(笑)

だいたいこの構成で、ArduRoverとRTKでコースを走らせられそうな感じですね。
とわかりつつ。。 こないだu-blox N6Mを買って少し試してみたので。。
こんどは、N8Mを試してみたくなりました(笑)
今度は、USB付きで、外部アンテナのポートもついているものを選んでみました。
U-blox NEO-M8N
いまは、こんなにたくさんの衛星が飛んでいるんですね。
http://qzss.go.jp/technical/satellites/index.html
こいつは、はぼ全部とれるようです。
| GNSSの衛星 | BeiDou, Galileo, GLONASS, GPS / QZSS | ||
で、みちびき は QZSSというGPSを精度を補強するようなもので、どれくらいの精度かというと、現実は、まだ±1mくらいのようですね。
http://qzss.go.jp/technical/technology/okinawa_181011.html
家でどれくらいの精度で位置が安定するのか??
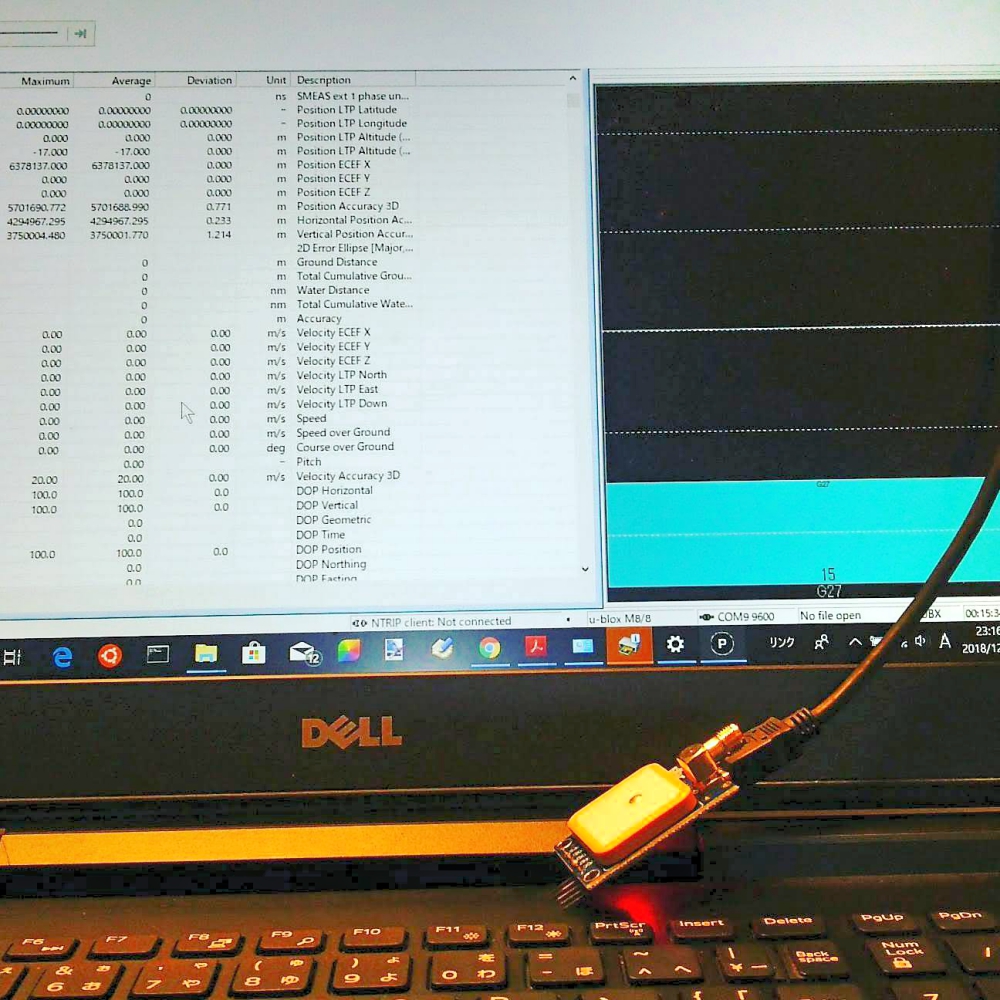
今回は、U-bloxのU-centerというWindowsのアプリを使って検証してみました。
https://www.u-blox.com/ja/product/u-center
おうちの中ですが、木造なので信号は取れます。ちなみに、地下ではさすがに取れなかった。移動して精度をみるわけじゃないので、固定した場所でどれくらいドリフトしていくのかを見てみました。
簡単なんで。。結果だけ。。
電源入れたら10分~15分くらいで、位置を取得し始めます。7個のGPSを受信してそこから計算していくようです。

20分間ほど固定位置でとってみました。

平均すると、だいたいあっているようなんですが、やはりドリフト量はかなりあるみたいで、±75mくらいの広がりになってしまっていますね。これだと、NEO-6のシリーズとそれほど変わらないですねぇ。。
あかんやん(笑)
D-GPSか、RTK-GPS
やっぱり固定局の位置を使って精度向上しないとダメみたいですね。D-GPSは位置のドリフトだけを取るような感じで精度は数m以内、RTK-GPSは、位相まで使って位置を再計算するので数cmまでの精度がでるそうです。ちなみに、N8Pというモデルだと、RTKのエンジンが付いているようです。でもあまり出回ってないようですね。
https://isabou.net/knowhow/colum-it/colum17.asp
ソフトウェア的に処理をしようとすると、RTKLIBというものがあり、それを使うとできるそうです。
http://www.rtklib.com/
UbuntuかWindowsで動くようですね。入れてみようっと。。
使い方は、こちらに詳しくのってます。u-centerで試してからじゃないと、設定できないですね(笑)
https://isabou.net/knowhow/colum-it/colum19.asp
binフォルダに、rtklaunch.exe があるので、それを起動
24時間くらい基準局と比較しながらデータとりをしないといけなさそうです(笑)

現在データ取得中。。 お楽しみは後で・・(笑)
コメントを残していただけるとありがたいです