目次
ほとんどがCygwinの設定だったような気もしますが・・
前回は、gitでArudPilotを入れて、Plane用のシミュレータまで入れました。実は、もうインストールは終わっている状態です。
http://tom2rd.sakura.ne.jp/wp/2016/10/19/post-2125/
といっても、Cygwinの設定がほとんどだったかもですね。ほんと昔にくらべて多様化しているので、どれを追ったらいいのかってわからないですねぇ。。
では、予告の通り・・・
FlightGear 3D View (Optional)
3DViewを追加する場合は、 FlightGear Flight Simulatorを入れるそうです。
が・・・Windows版では、Verが3.4じゃないとだめとかいろいろあるみたいなのと、動きがどうも遅そうだし・・・僕やりたいのは、車なので、本当は飛ばなくていいので、入れるのやめました(笑)
なので、今回は、実は SITL関連の動かし方説明ですね。
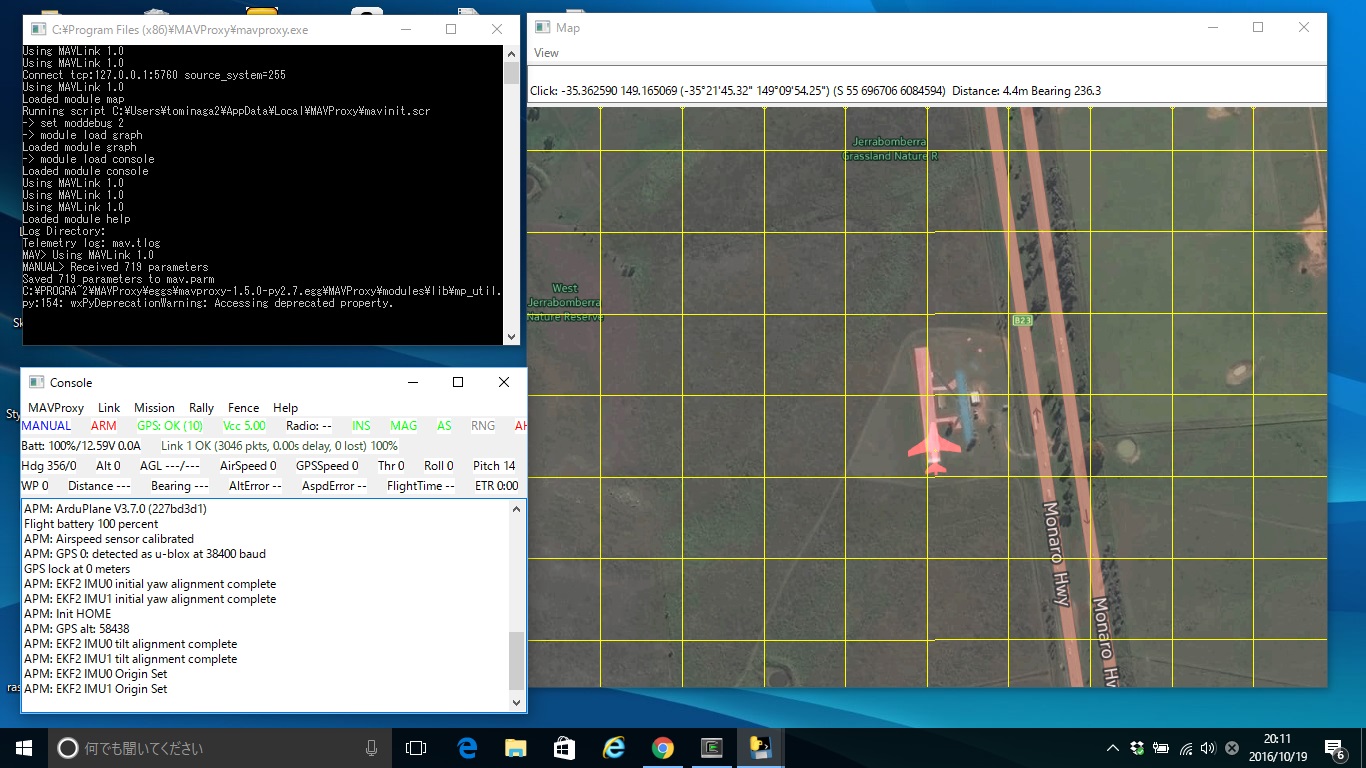
SITL と MAVProxy を動かしてみる。
Planeモードで動かした様子が、一番上の写真です。
cd ~/ardupilot/ArduPlane sim_vehicle.py -j4 --map
前回、このコマンド入れたら、実は動いていたんですよね(笑)
ドローンモードで動かしてみるには
cd ~/ardupilot/ArduCopter sim_vehicle.py -j4 --map
とする。
違いは、Mapが、ドローンの形しているだけですけどね。。

では、Roverでは?
cd ~/ardupilot/APMrover2 sim_vehicle.py -j4 --map
形が変わった?(笑)

MAVProxyのコマンド
MAVProxyは、コマンドラインでモードを切り替えたりするみたい。
さて・・・今日はここまで・・・
次はMission Plannerを入れて、MAVProxyと接続して動かしてみるところをするかな?
って・・・思ってたら、Japan Droneさんが、MAVProxyのコマンドでの操縦などArudPilotの入門記事を書いているのを見つけました。
MAVProxyのコマンドでの操縦
http://www.drone-j.com/dronetechblog/ardupilot04/
MissionPlannerの使い方
http://www.drone-j.com/dronetechblog/ardupilot05/
凄く分かりやすくまとめられています!
コメントを残していただけるとありがたいです